





Основанное в 2001 году, это национальное высокотехнологичное предприятие, которое объединяет исследования и разработки, производство, продажи и послепродажное обслуживание.
ИЩИТЕ ТО, ЧТО ВЫ ХОТИТЕ
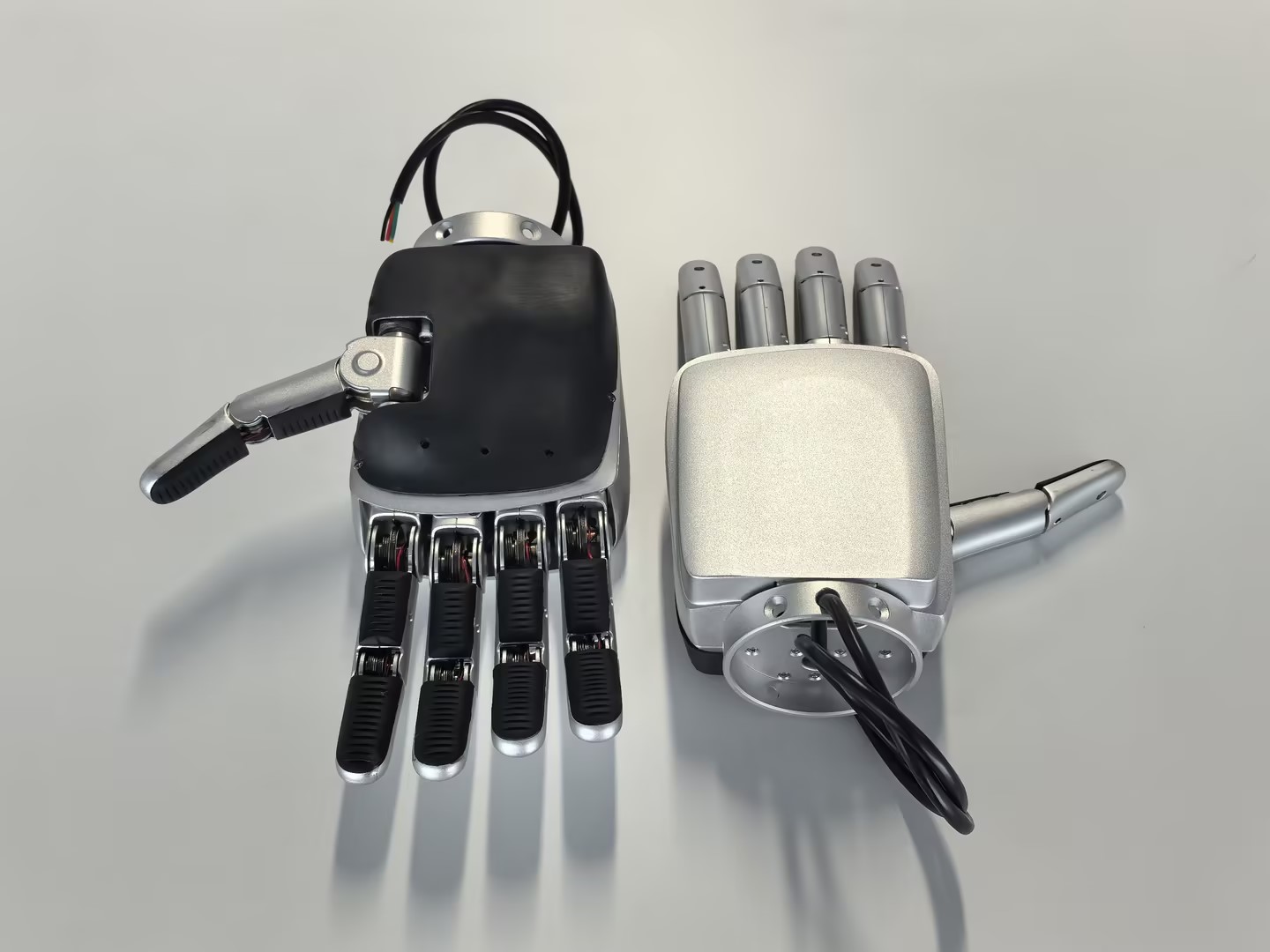
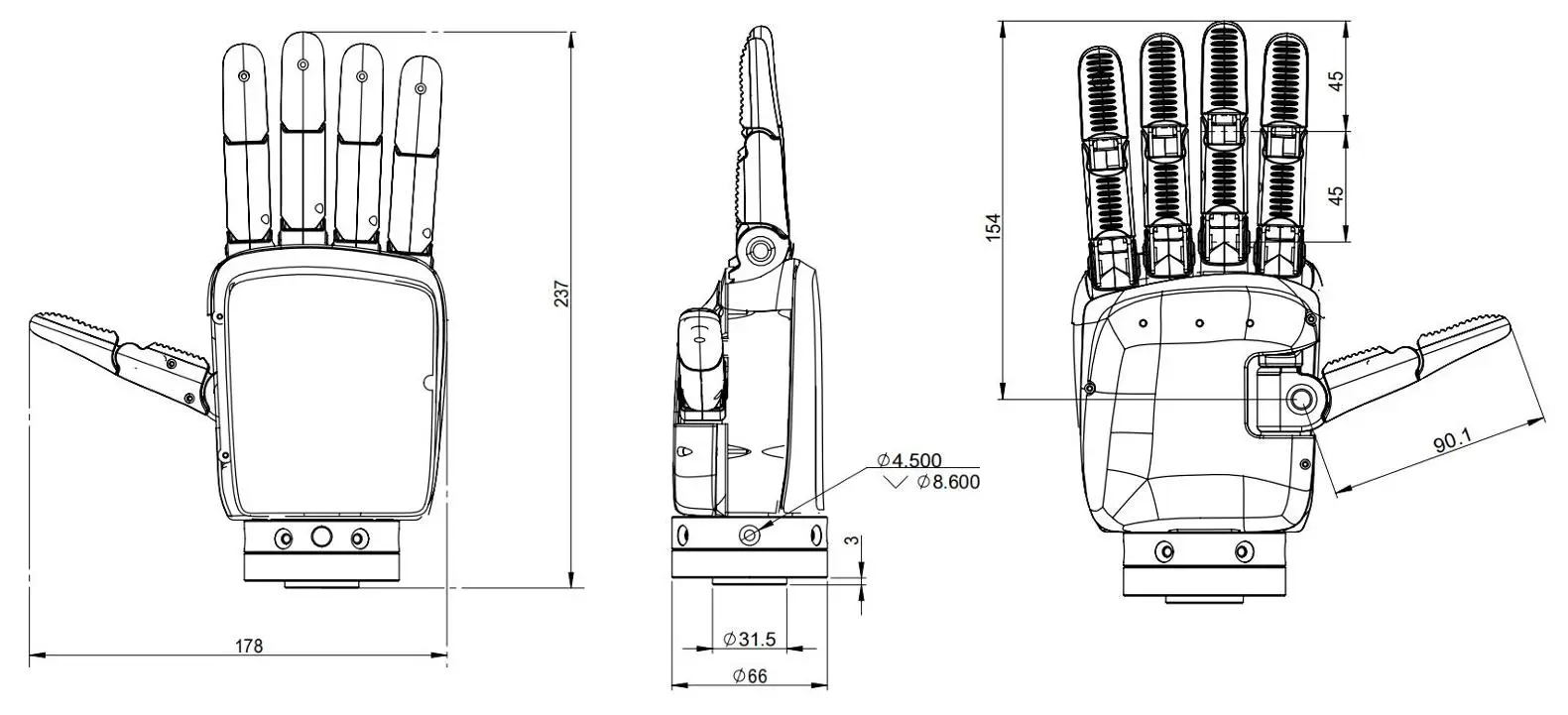
| LZ001 Промышленные Ловкие Руки | |||
| Индекс данных | |||
| Количество пальцев | 5 | Цикл жизни | 1 миллион циклов |
| Степень свободы | 11 | Датчик давления пальцами | Десять |
| Количество приводов | 6 | Кабельный привод | |
| Сопротивление совместному удару | Служба поддержки | Рабочее напряжение | ДК48В ± л0% |
| Вес нетто | 1,2 кг | Рабочий ток | 4А |
| Максимальная сила пинчинга | 10 кг | Интерфейс управления | Модбус485 / ЭтерКАТ |
| LZ002 Промышленные Ловкие Руки | |||
| Индекс данных | |||
| Количество пальцев | 5 | Цикл жизни | 1 миллион циклов |
| Степень свободы | 15 | Датчик давления пальцами | Пять |
| Количество приводов | 6 | Соединительный привод | |
| Захватывая время | 0,3 с | Рабочее напряжение | ДК48В ± л0% |
| Вес нетто | 500г | Рабочий ток | 2А |
| Максимальная сила | 3 кг | Интерфейс управления | Модбус485 / ЭтерКАТ |
| LZ010 Перчатка данных | |||
| Индекс данных | |||
| Количество гибких / угловых датчиков | 10 | Количество ИМУ | 6 |
| угловое разрешение | 0.01° | Диапазон акселерометров | ± 18 г |
| Точность отношения | ≤ 0.5° | Интерфейс | USB и Ethernet |
| Задержка коммуникации | ≤ 20 мс | Вес перчатки | 100 ± 5 г |
| Бесшовная интеграция моделирования | физические движки, такие как Mujoco и Isaac Lab | Комплект разработчика (SDK) для индивидуальной разработки. | |
| Экспорт данных | Предоставляет интерфейсы плагинов и API для сторонних инструментов, включая Unity, Unreal Engine (UE) и MotionBuilder. | Воспроизведение данных | Программное обеспечение поддерживает функции воспроизведения данных, запросов и сохранения. Он поддерживает стандартные форматы данных движения, включая BVH и FBX, и предоставляет программное обеспечение |
Основанное в 2001 году, это национальное высокотехнологичное предприятие, которое объединяет исследования и разработки, производство, продажи и послепродажное обслуживание.
© 2025. Все права защищены. Кайлонг Хай Технолоджи Ко., Лтд.
Питаться отiglobalwin.com